Differential Swerve Drive
Gallery


Project Overview
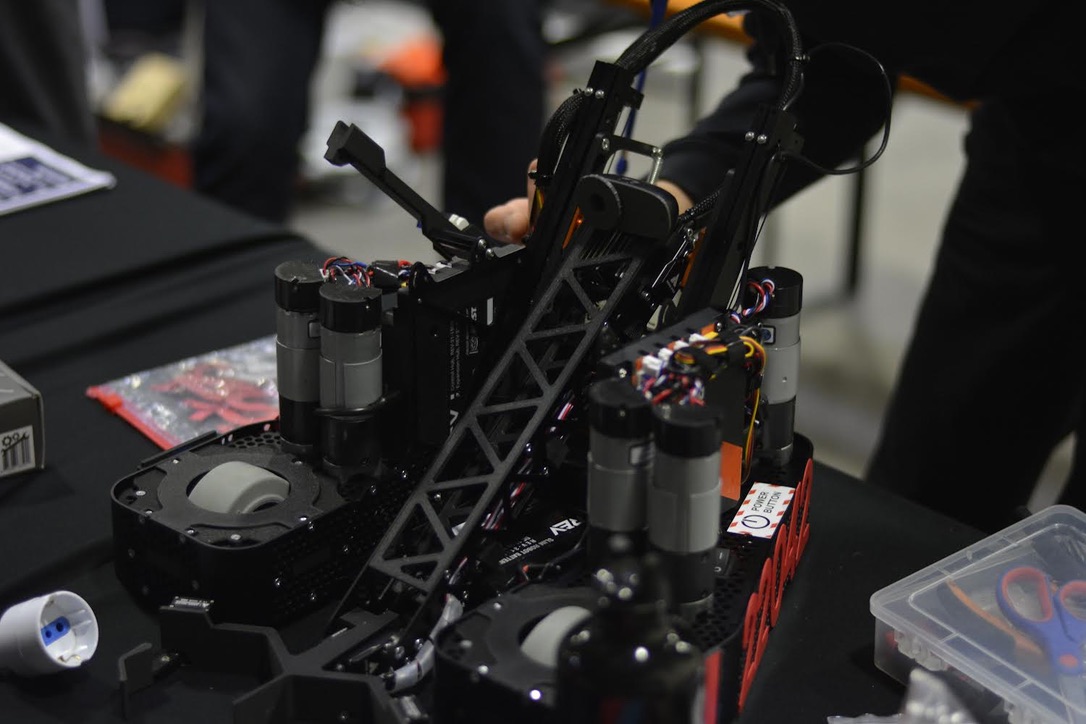
This differential swerve drive was developed over two years as a flagship engineering and research project. The objective was to create a compact, reliable, and high-performance movement system capable of omnidirectional motion with extremely fast response times.
The final iteration consists of three fully custom differential swerve modules, a lightweight and optimized chassis, and a responsive software stack designed for both tele-op and autonomous operation. The system includes custom machine learning vision, advanced optimisation algorithms, and precise kinematic modeling.
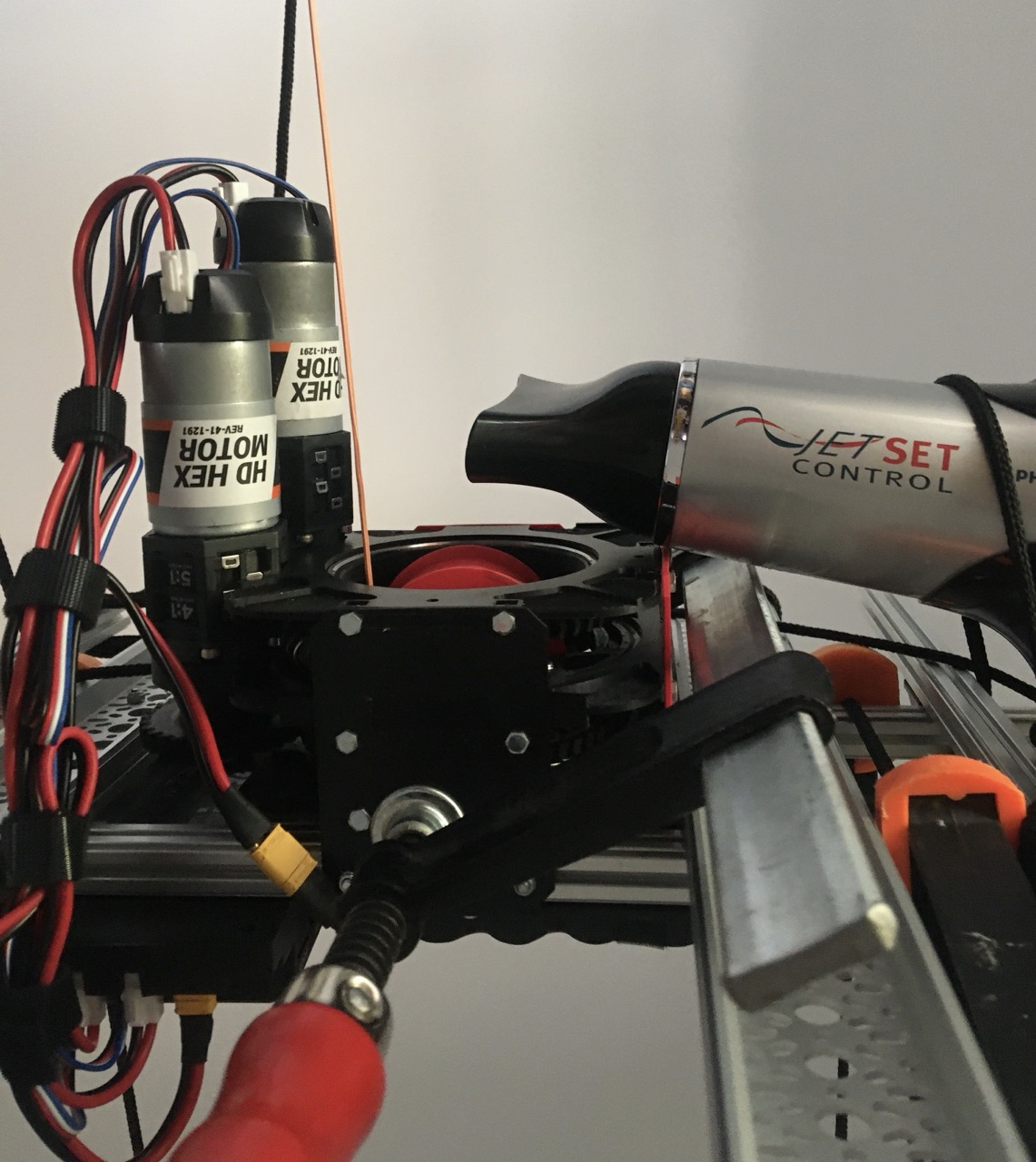
- High torque&speed differential swerve architecture
- Two FTC seasons of iterative development
- Endurance-tested under real load (1500+ cycles, 10+ hours continuous)
- Laser-cut, CNC’d, and 3D-printed hybrid construction
- TensorFlow-lite custom object detection running on-board the Control Hub
I also refined multiple load-bearing interfaces to withstand repeated shock loads during high-speed maneuvers. Extensive FEA-driven redesigns reduced component mass while maintaining structural reliability. I introduced modular retention features that accelerated repair times between matches. Finally, I trained countless Tensorflow-lite object detection models to optimize pattern detection time and efficiancy.